圖片:

圖片:

圖片:
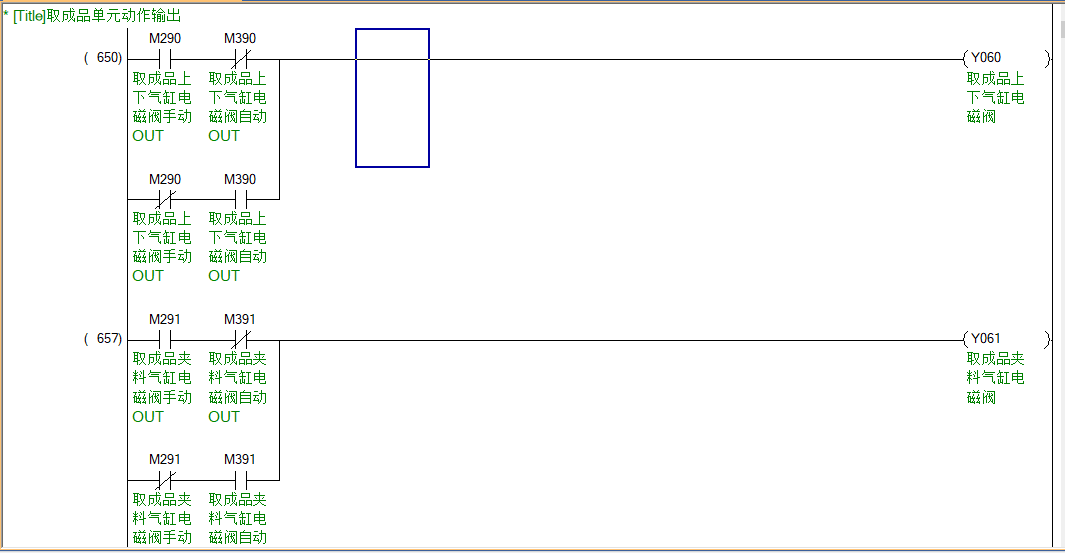
上傳了3個圖片,分別是手動操作,手動操作復(fù)位,手動和自動輸出,
自動控制就沒有上傳程序,其實就是把手動和自動輸出分開控制,然后再一起合并輸出動作,手動輸出和自動輸出進(jìn)行互鎖就可以。
就拿M290和M390來說吧,假設(shè)自動運行時M390--ON的時候,Y60--ON,這個時候進(jìn)行手動模式,不會影響M390---ON,進(jìn)行手動操作讓M290變成ON的,這樣M290常閉點就會斷開M390常開的那條路,也就是控制Y60斷開。如果M290交替再斷開,下面那條路又導(dǎo)通,這樣就可以實現(xiàn)Y60狀態(tài)進(jìn)行轉(zhuǎn)換,當(dāng)手動操作完后,進(jìn)行自動模式后,按啟動按鈕就會把手動操作全部復(fù)位掉,又自動變到之前的自動狀態(tài)。
[ 此帖被daihdn在2019-08-29 11:54重新編輯 ]
 滬公網(wǎng)安備31010802001143號
滬公網(wǎng)安備31010802001143號

