各位前輩,我是西門子的初學者,最近買了本電子科技大學出版社的《電氣自動化控制技術實訓教程》,感覺下面幾道實訓題綜合性強,能在練習中很快提升水平,可惜書上沒有提供參考的程序。求前輩們試做一下,以資借鑒,在此謝謝各位前輩了!!!
我的郵箱是
lcr_6406@126.com (一)題目名稱:PLC在鋼包車走行及鋼包車頂升上的應用
1. 工藝流程:
任務:圖所示為鋼包車走行及鋼包車頂升示意圖,
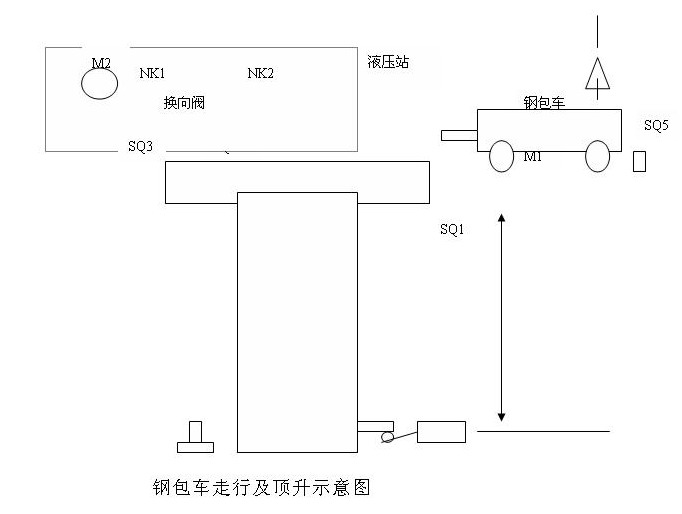
鋼包車走行由M1三相異步電動機拖動,鋼包車走行有一處理位減速極限SQ4和一個處理位停止極限SQ3,和一個原始位極限SQ5。當鋼包車頂升在低位且處理位極限SQ3未到時,鋼包車走行才能向處理位開,當鋼包車開到處理位,才能啟動液壓泵M2。鋼包車頂升動作由液壓驅動,由液壓泵M2、換向閥控制,鋼包車頂升有一低位極限SQ2和一高位極限SQ3,換向閥NK1線圈得電時頂升上升,換向閥NK2線圈得電時頂升下降,鋼包車頂升高度由一測距儀檢測,鋼包車頂升最大行程250cm。
2.控制要求:
(1)控制設計符合電氣設計規范,具有必要的保護功能;
(2)工作方式為按操作人員在WINCC畫面上設定好鋼包車頂升高度后,按自動按鈕,鋼包車先返回原始位,閥NK3打開給鋼包車加料,10秒后,自動關閉NK3閥,鋼包車自動向處理位開;
(3)電機M1由變頻器拖動,鋼包車向處理位開動時,電機全速運行,到處理位減速極限,速度減半運行,到處理位停止極限時停止運行;
(4)鋼包車到處理位后自動啟動鋼包車頂升,速度設為100cm/min,自動計算頂升高度,當到達設定高度時鋼包車頂升自動停止。10秒后鋼包車自動下降,到底位后自動啟動走行電機返回原始位。
(5)用WinCC界面顯示鋼包車頂升示意圖,要有鋼包車頂升高度輸入窗口、上升和下降用箭頭線顯示;
(6) 在信號控制屏上有電機和傳送帶工作狀態指示。
3.考核要求及評分標準:
(1)畫出PLC控制系統原理圖(不畫主電路部分)。
(2)完成遠程機架與接觸器盤的正確接線(不含主電路部分)。
(3)按控制要求完成硬件組態、并下載到PLC。
(4)能實現所有的控制功能。
(5)WINCC界面功能。
[ 此帖被shxzg88在2010-06-25 16:51重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

