手頭有個項目用的是1214的CPU,需要用到CAN總線,考慮過CM CANopen 021620-B模塊,但是不巧這個模塊只能用于CAN2.0A,所以只能用第三方的CAN轉485模塊。
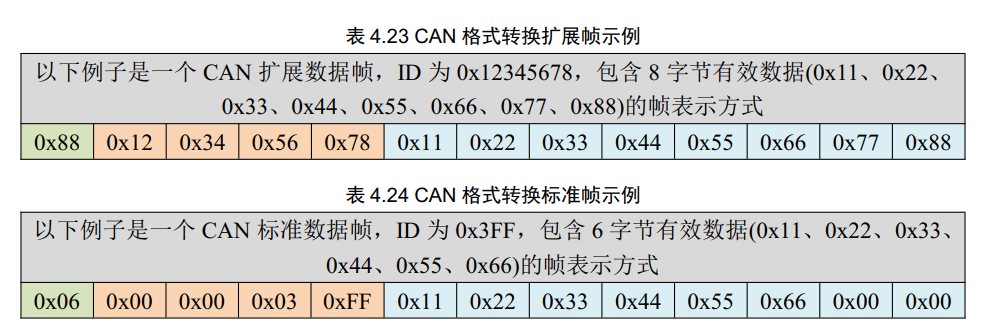
模塊采用固定的個是轉換,每一幀CAN報文都轉換出13個字節長度的數據:
CPU組態了CM1241模塊,用自由口通訊來接收和發送串口數據。測試時發現CAN總線上發送兩個ID報文,每條的數據都間隔100ms加1,在PLC端仿真看兩個ID的數據是不同步的在自增,一會第一個ID的數據在漲,第二個ID的數據不變,一會第二個ID的數據漲,第一個ID的不變……
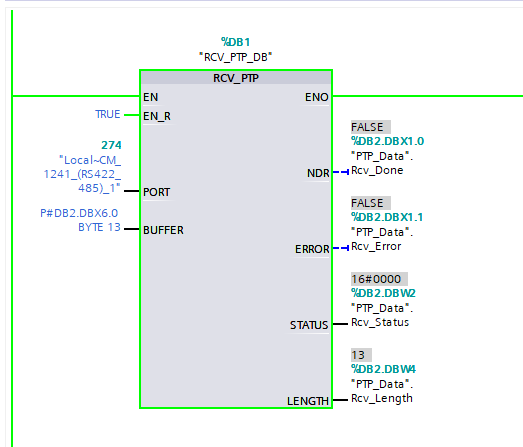
這里還想問下RCV_PTP和Receive_P2P功能塊的區別,我現在用的是RCV_PTP,說明里說EN_R在上升沿啟用接收,但是我實際發現一直給TRUE也是可以接收的。我使用Receive_P2P就沒有接收成功過數據,這是什么原因?
這是我功能塊的配置圖:
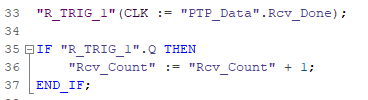
同時我做了個NDR的上升沿捕捉計數器,發現只有程序第一次運行的時候漲了一次,后面就一直不漲。
另外我發送用的是Send_P2P功能塊。CM1241和轉換器的連接用的是422四線制全雙工,發送和接收是單獨處理的。
我的疑問在于CAN轉換器是收到總線上的報文立刻進行轉換的,當總線上的報文很多時,同一時刻在串口端只會發出一幀對應的CAN報文,也就是13個字節,如果串口這邊還沒讀完,下一幀轉換的數據又來了,就有可能讀不到了。我也咨詢過轉換器的技術,說CAN波特率和串口波特率要差不多,現在CAN是250K,串口這邊已經是115200了。出現這種現象是我的接收處理有問題還是用這樣的方法只能實現這樣的效果?望高手們指點,不勝感激!
[ 此帖被ferrari550c在2020-11-25 08:50重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

