三菱QD75P1N定位模塊控制臺達A2伺服,執(zhí)行回原點操作的時候,定位模塊接收不到伺服驅動器的零信號。
QD75P1N OPR 方法:近點狗法(以規(guī)定好的回原點速度和方向回原點,通過近點狗的OFF-------->>ON減速到爬行速度,在從近點狗從ON---------->>OFF后,運行停止在第一個零信號處,回原點動作完成)。
接線圖如下:
1.QD75P1N
2.臺達A2 CN1
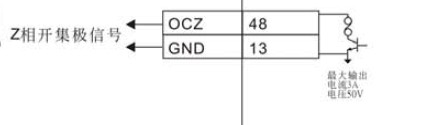
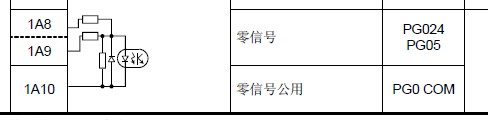
QD75P1N 1A8 ------------------------------------------臺達A2 CN1 48
QD75P1N 1A10------------------------------------------0V
臺達A2 CN1 48--------------------------------------------0V
0V為開關電源的0V。
不知道是我接線錯誤還是參數(shù)我設定不對,回原點后馬達降到爬行速度后,一直在找零信號。
盼高手指點,萬分感謝!
 滬公網(wǎng)安備31010802001143號
滬公網(wǎng)安備31010802001143號

