臺達伺服常見問題如下:一、 使用ASD-A2系列伺服系統時,該如何適當地使用電子齒輪比,完成輸出脈波定位功能?
用戶可先計算出伺服馬達轉一圈之長度(圓周 長)。由于ASDA-A2馬達轉一圈所需之脈波數為1,280,000個,可搭配ASDA-A2電子齒輪比參數P1-44、P1-45。例如,若用戶欲 從運動主機(PLC),送出30,000個脈波,進而讓ASDA-A2馬達轉一圈,此時可將P1-44 => 128,P1-45 => 3,即可讓ASDA-A2馬達運轉一圈,進而達到定位要求。
二、 客戶端調整的負載慣量比與實際的慣性比為何會不一樣?
有可能是下列的原因
我們在負載慣量估測是有所限制條件如下
負載慣量估測的限制
1.到達 2000 RPM 之加減速時間需在 1秒以下
2.回轉速需在 200 RPM 以上。 3.負載慣量需為馬達慣量的 100 倍以下4..外力或慣性比變化不得太劇烈。5.自動增益模式(固定慣量P2-32為3 或 5),負載慣量停止估測。
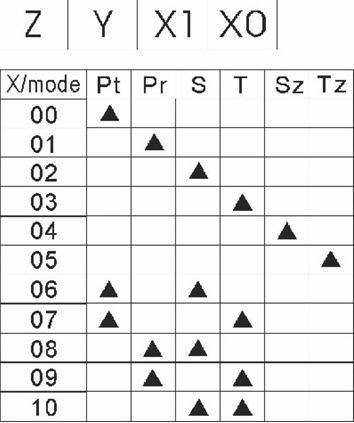
三、 臺達伺服如何變更控制模式?
將參數P1-01設定為所欲控制之模式后(參考下表) ,設定好參數后,需將伺服驅動器重新上電后 ,便已修改控制之模式。
Pt:位置控制模式(命令由端子輸入) Pr:位置控制模式(命令由內部緩存器輸入)
S:速度控制模式(端子/內部緩存器 T:扭矩控制模式(端子/內部緩存器)
Sz:零速度/內部速度緩存器命令 Tz:零扭矩/內部扭矩緩存器命令
 更多臺達伺服常見問題請訪問:http://www.deltagreentech.com.cn/sc/service/QA.aspx http://www.deltagreentech.com.cn/sc/service/QA.aspx
更多臺達伺服常見問題請訪問:http://www.deltagreentech.com.cn/sc/service/QA.aspx http://www.deltagreentech.com.cn/sc/service/QA.aspx
 滬公網安備31010802001143號
滬公網安備31010802001143號

